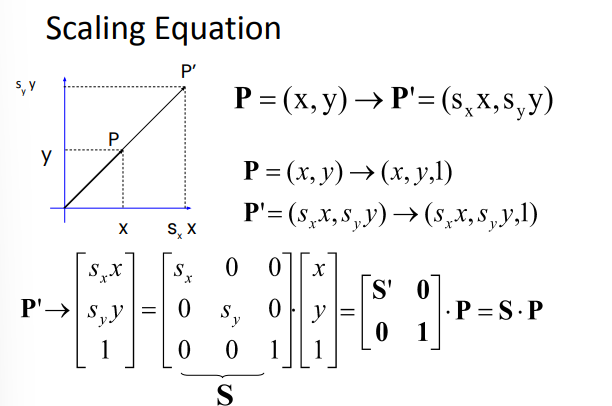
scaling
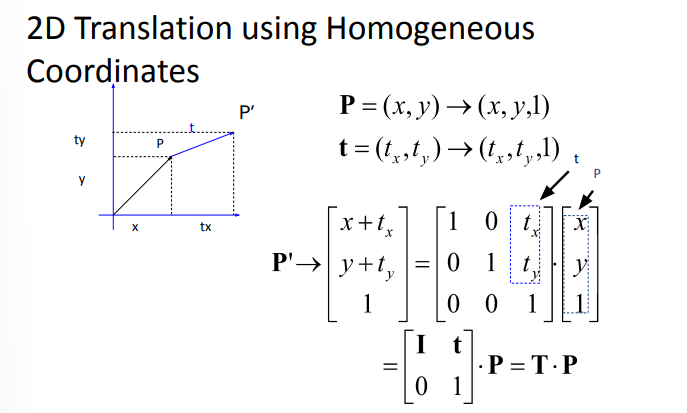
translation
- enabled by homogenous coordinates
- third col of left matrix always multiplied with third row of vector
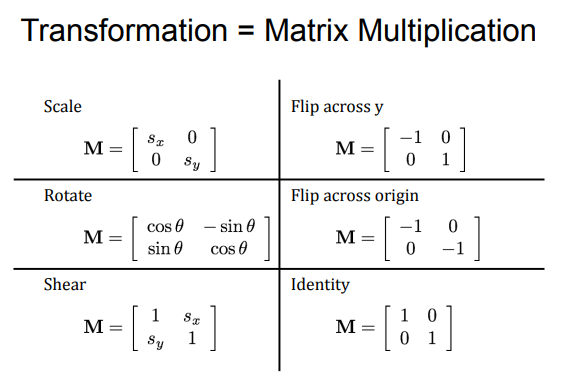
rotation matrix
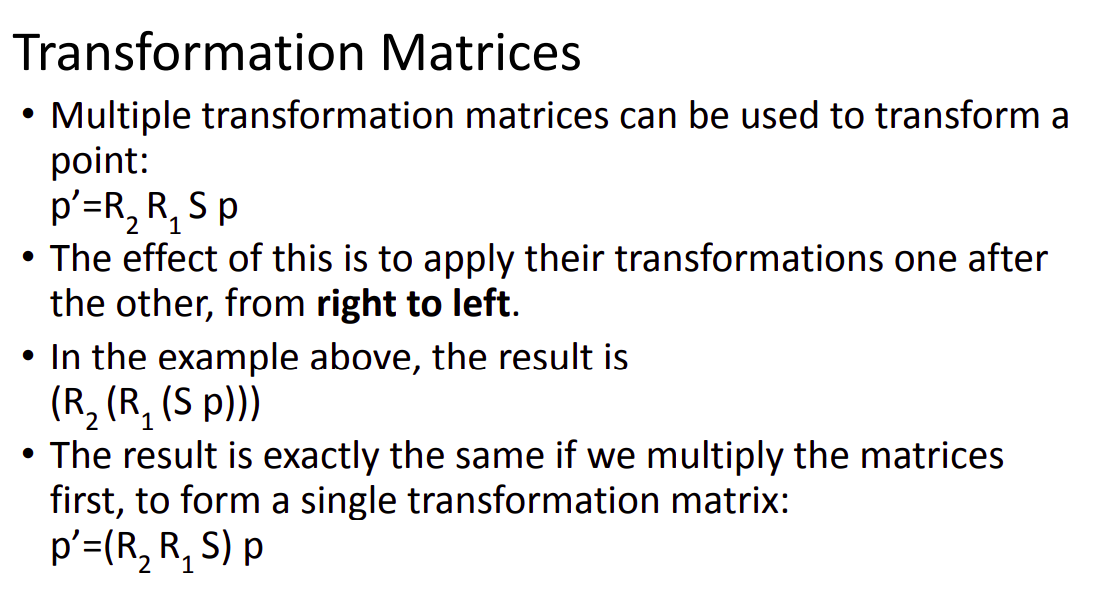
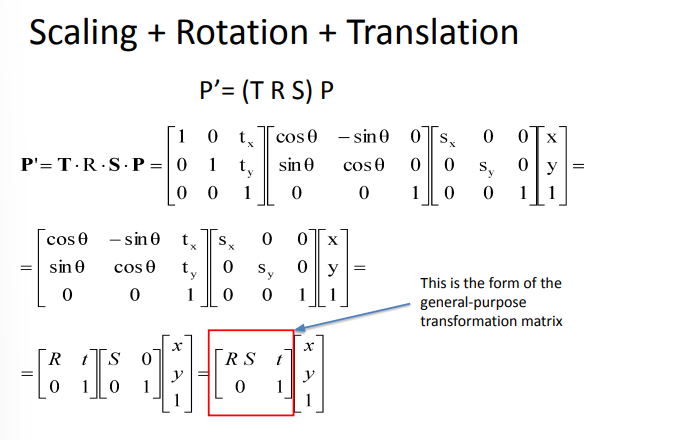
scaling + rotation + translation
inverse
- reverses transformation effect
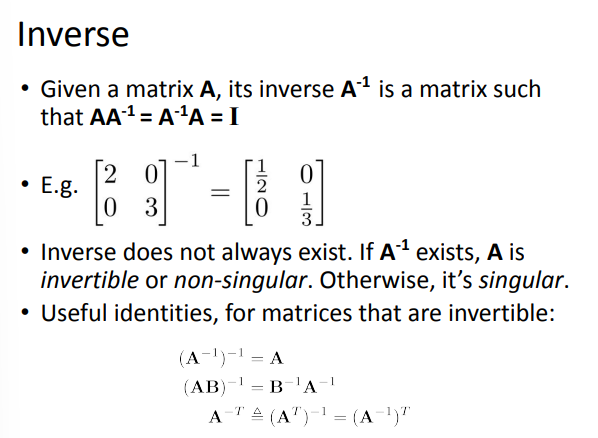
can find pseudoinverse
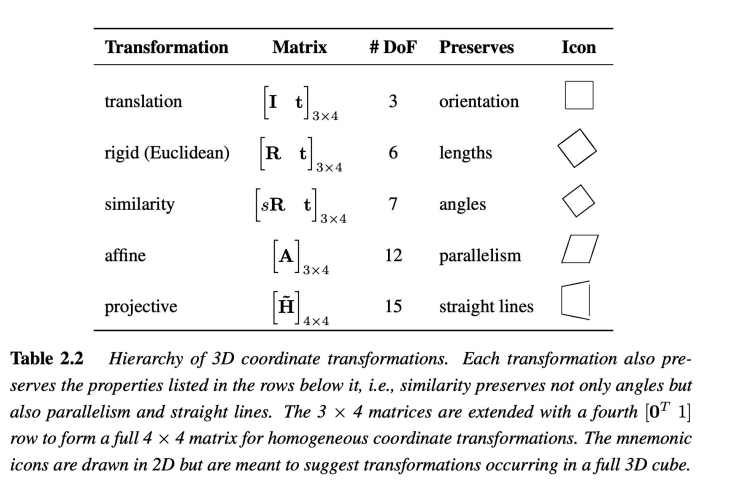
similarity
geometric transformations
affine
projection matrix