see neural networks, convolution
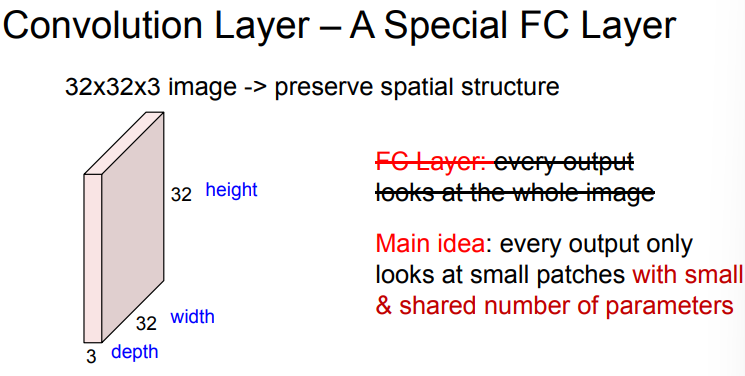
- Local Connectivity: Each output depends only on a small input patch (reduces parameters).
- Parameter Sharing: The same filter scans the entire image (efficient computation).
operations
- convolution - apply filters to get features
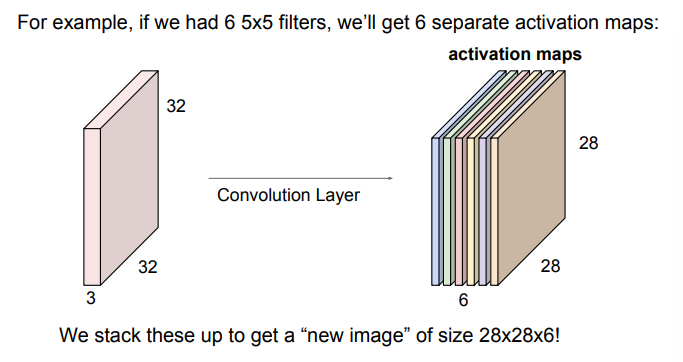
- Example: A 5×5×3 filter applied to a 32×32×3 input produces a 28×28×1 output (no padding, stride=1).
- Stride and padding
- Stride: Controls how much the filter shifts (reduces output size).
- Padding: Adds zeros to maintain spatial dimensions.
- Pooling (downsampling)
- reduces size while preserving important features (like max pooling - taking max of a certain window (set filter size K and stride S))
architecture
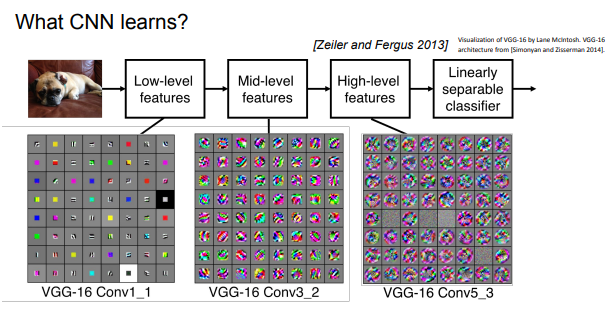
- hierarchical feature learning
- early layers do Edge Detection
- middle layers do corner detection
- deeper layers get semantic meaning
- Example: AlexNet (2012) – First CNN to outperform traditional methods by a large margin.
conv layer needs 4 hyperparams
- num filters (output channels)
- filter size K
- stride S
- zero padding P produces output of
- num params: and biases
- convolve filter with image, computing dot prods - filters always extend full depth of input volume
other
- param configs
- Gradually reduce spatial dimensions while increasing channels to balance computation.
- Example: 224×224×3 → 55×55×48 → 13×13×192.
- Automatically learn hierarchical representations, similar to human vision.
- Replace handcrafted features (e.g., HOG, SIFT) with data-driven filters.
one filter ⇒ one activation map