rows and columns are always mutually perpendicular (orthogonal) unit vectors
-
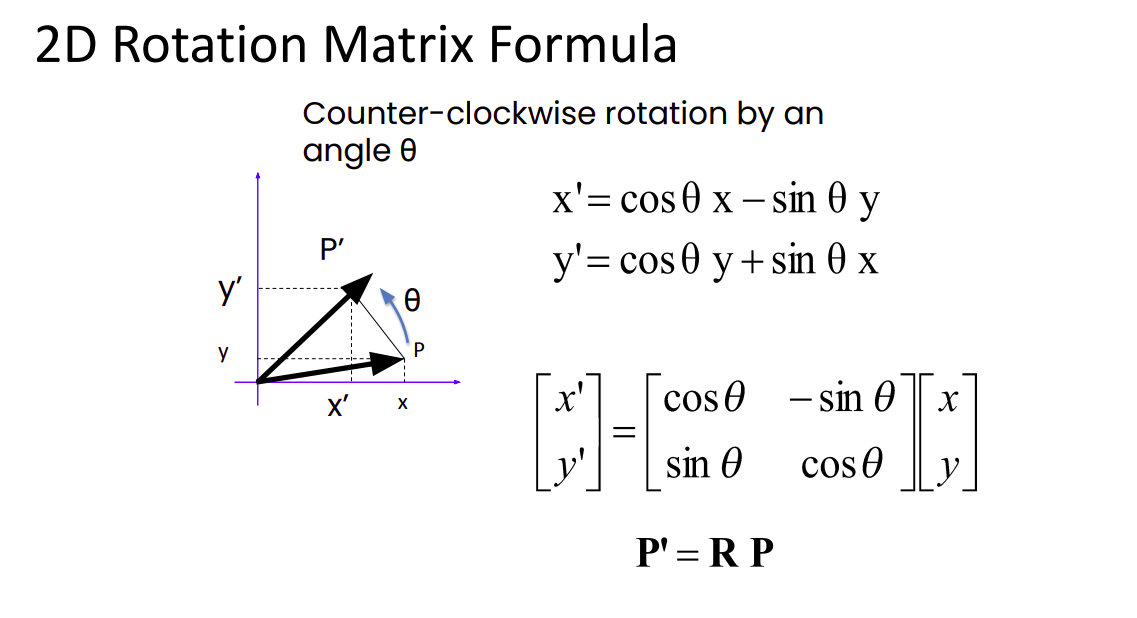
rotates a point counterclockwise by an angle θ around the origin.
-
R is a normal matrix -
-
Transpose of a rotation matrix produces a rotation in the opposite direction
-
inverse is transpose
-
orthonormal
https://en.wikipedia.org/wiki/Rotation_matrix
Conceptual explanation/derivation: TODO