scale invariant detection
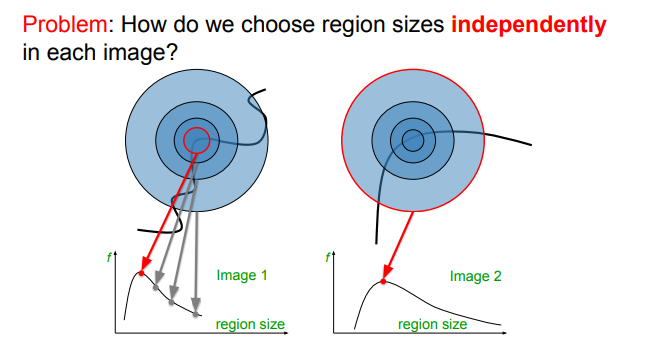
Picking Patch Size - Common approach to choose scale:
-
Take a local maximum of this function
-
Important: this scale invariant region size is found in each image for each corner!
-
Observation: the region size at the maximum should be correlated to the keypoint’s scale. In other words, the size is correlated with the size of the corner
-
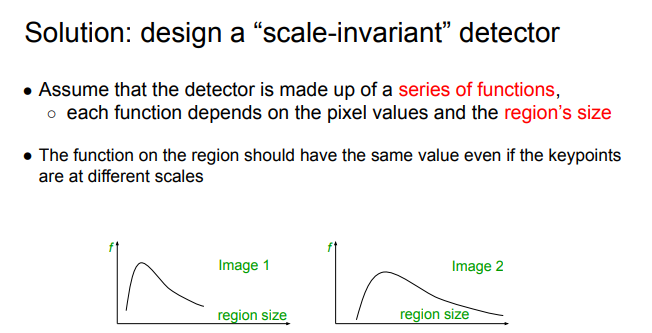
A “good” function for scale selection has one stable sharp peak
- concave
-
For usual images: a good function would be one which responds to contrast (sharp local intensity change)
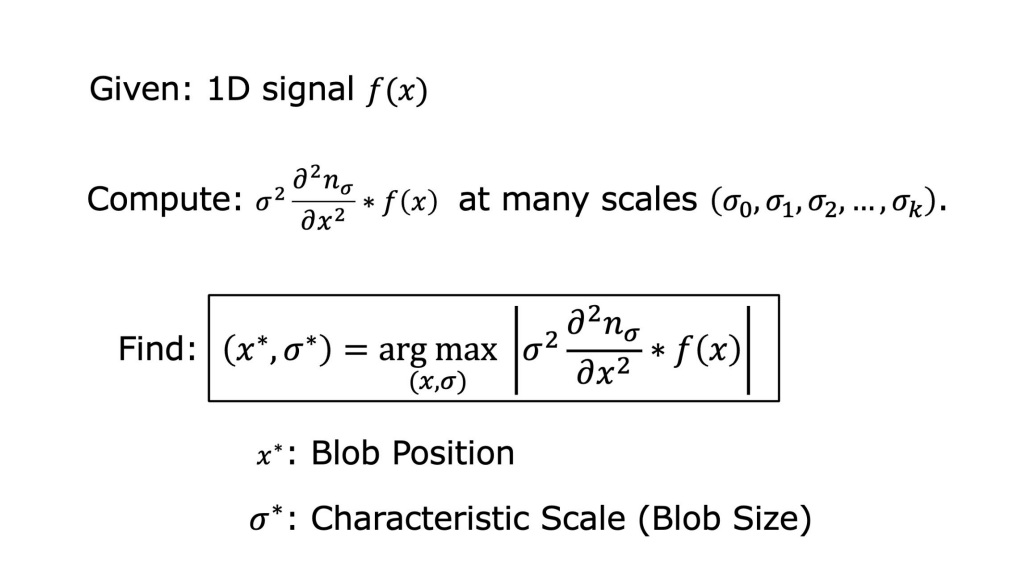
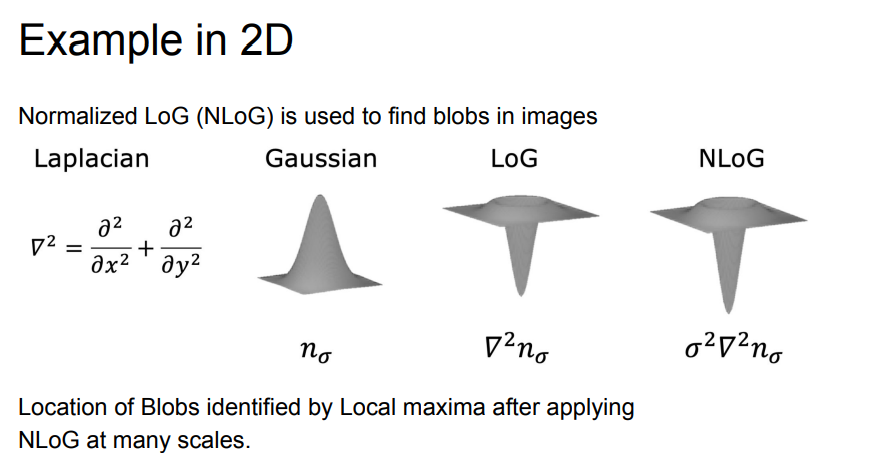
blob detection
-
with Laplacian of Gaussian LoG of gaussian
-
sigma is hyperparameter
problem
The size of the filter increases with increasing sigma. Meaning that larger blobs require a larger filter.
We have to convolve multiple filters of different sized laplacians to find all blobs. This is computationally expensive!
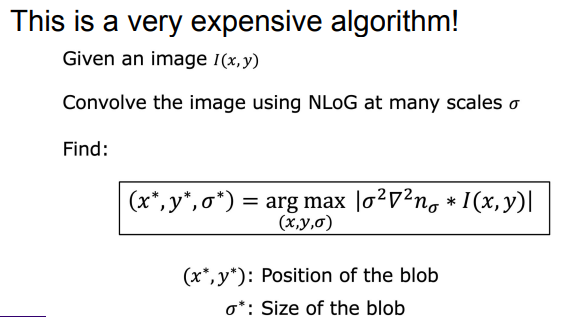
sigma represents size of filter
detectors
gaussian is separable but laplacian is not - saves computation
summary
- Given: two images of the same scene with a large scale difference between them
- Goal: find the same interest points independently in each image
- Solution: search for maxima of suitable functions in scale (DoG with different size) and in space (convolution over the image)
We now can detect keypoints at varying scales. But what can we do with those keypoints? Things we would like to do:
- Search:
- We would need to find similar key points in other images
- Panorama stitching
- Match keypoints from one image to another.
- Etc… For all such applications, we need a way of
describingthe keypoints.
next: local descriptor