how do we stitch images from diff viewpoints?
we can calculate homographies when
- the scene is captured under rotation only
homography matrix
-
can be written as ??
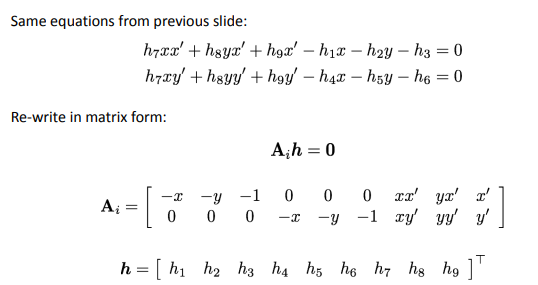
-
gives 2 rows per matching keypoint
- homogeneous linear least squares problem???
-
solve with singular value decomposition (SVD)
- h params are the eigenvector in V associated w smallest eigenvalue in sigma
Create a panorama
- find keypoints with SIFT - local detector or Harris Corner Detector
- Find matches with local descriptor , matching keypoints
- Sample N keypoints
- put samples in matrix form Ah = 0
- use singular value decomposition (SVD) to solve for homography matrix
- calculate inliners (reprojection error + threshold)
- repeat
- Re-calculate h using inliers from best homography
we are doing projective transformations, not affine
challenges solved by step 3
- noisy keypoints give bad transformation
- solution: RANSAC
use cases
- google street view
- other stitching software
accomplished tasks
- detect and match keypoints from many images to build one panoramic image
- Harris Corner Detector finds keypoints
- Build local descriptor and compare two sets of descriptors from diff images to find matching keypoints
- use least-squares to find affine transformation matrix that maps points in one image to another
- use RANSAC to get better estimate of affine transformation matrix
- transform second image and overlay on the first
- also, try different method HOG